
[행렬대수학] 행렬식(Determinant) 3 - 역행렬(Inverse Matrix)과 행렬식의 관계
Review
참고 포스팅 :
2020.09.05 - [Statistics/Matrix Algebra] - [행렬대수학] 행렬식(Determinant) 1 - 행렬식의 개념
[행렬대수학] 행렬식(Determinant) 1 - 행렬식의 개념
안녕하십니까, 간토끼입니다. 이번 포스팅에서는 행렬식(Determinant)에 대해서 다뤄보겠습니다. 내용이 다소 길어 2부작으로 나누어 올리려고 합니다. 행렬식(Determinant)이란, 정방행렬(Square Matrix)
datalabbit.tistory.com
2023.11.01 - [Statistics/Matrix Algebra] - [행렬대수학] 행렬식(Determinant) 2 - 행렬식의 유용한 성질과 수반행렬(Adjoint)
[행렬대수학] 행렬식(Determinant) 2 - 행렬식의 유용한 성질과 수반행렬(Adjoint)
HTML 삽입 미리보기할 수 없는 소스 Review 참고 포스팅 : 2020.09.05 - [Statistics/Matrix Algebra] - [행렬대수학] 행렬식(Determinant) 1 - 행렬식의 개념 [행렬대수학] 행렬식(Determinant) 1 - 행렬식의 개념 안녕하
datalabbit.tistory.com
안녕하십니까, 간토끼입니다.
행렬식 시리즈의 3번째 포스팅입니다. 생각보다 다루다보니 욕심이 생겨서 총 5부작으로 진행할 예정입니다.
지난 포스팅까진 행렬식의 성질에 대해서 다뤄보았으며, 특히 포스팅의 마지막엔 수반 행렬(Adjoint)의 개념을 소개하며 마무리했었죠.
이번 포스팅에서는 새로운 개념인 역행렬(Inverse Matrix)에 대해 소개하고, 이 역행렬과 행렬식이 어떤 관계가 있는지에 대해 다뤄보겠습니다.

1. 역행렬(Inverse Matrix)의 개념
역행렬에 대해서 알아보기 전에, 가볍게 다음과 같이 간단한 미지수가 1개인 방정식을 생각해봅시다.
만약
간단합니다.
바로 계수의 역수인
그러면 미지수가 2개인 방정식의 해는 어떻게 구할까요?
우선 미지수가 2개이니, 2개의 식이 필요하겠죠.
연립방정식을 이용해도 되겠지만, 우리는 행렬의 개념에 대해 배우면서 위 선형시스템(linear system)을 다음과 같이 표기할 수 있다고 했습니다.
여기서 방정식의 계수 부분을 행렬
그러면 방정식의 해(solution)
우리가 배운 개념을 활용한다면 행렬
하지만 위에서 언급한 '계수의 역수를 곱하는' 방법을 사용해볼 수도 있지 않을까요?
만약 양변에
우리가 찾고자 하는 solution vector
결론부터 말하자면
그렇지만 이런 관점으로 접근해보는 것은 충분히 합리적인 접근 방법이라고 생각합니다.
역행렬(Inverse Matrix)은 이러한 관점을 만족하는 개념입니다.
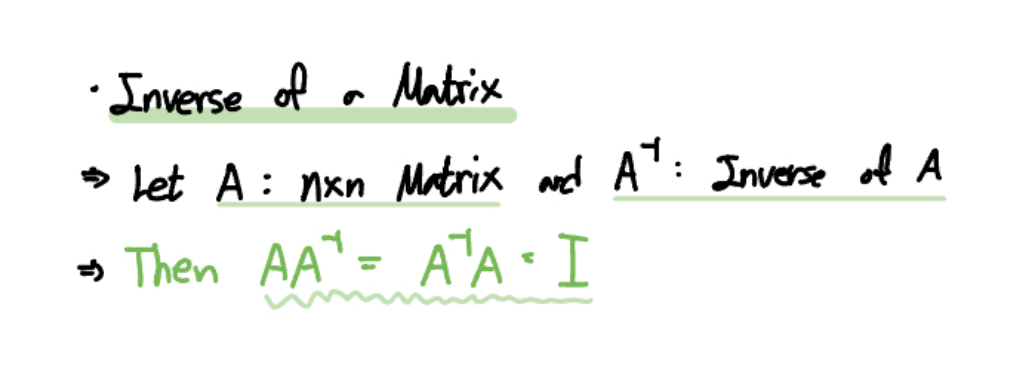
만약 어떤 정방행렬(Square Matrix)
그리고 다음을 만족하는 행렬
직관적으로 어떤 상수
그리고 상수
행렬의 관점에서는 이를 right inverse, left inverse 라고 합니다.
그리고 위 행렬
또한 이런 가역행렬은 항상 Non-singular Matrix 입니다.
그러면 임의의 가역행렬에 대해서 역행렬은 항상 유일하게 존재할까요?
네, 맞습니다. 항상 유일한 역행렬을 갖습니다.

만약 가역행렬
그러면 역행렬의 정의에 의해
위 과정을 통해 가역행렬의 역행렬은 항상 유일함을 증명할 수 있습니다.
간단한 2차원 행렬을 통해 가역행렬과 그 역행렬의 곱이 Identity Matrix가 되는지 한번 보도록 하죠.
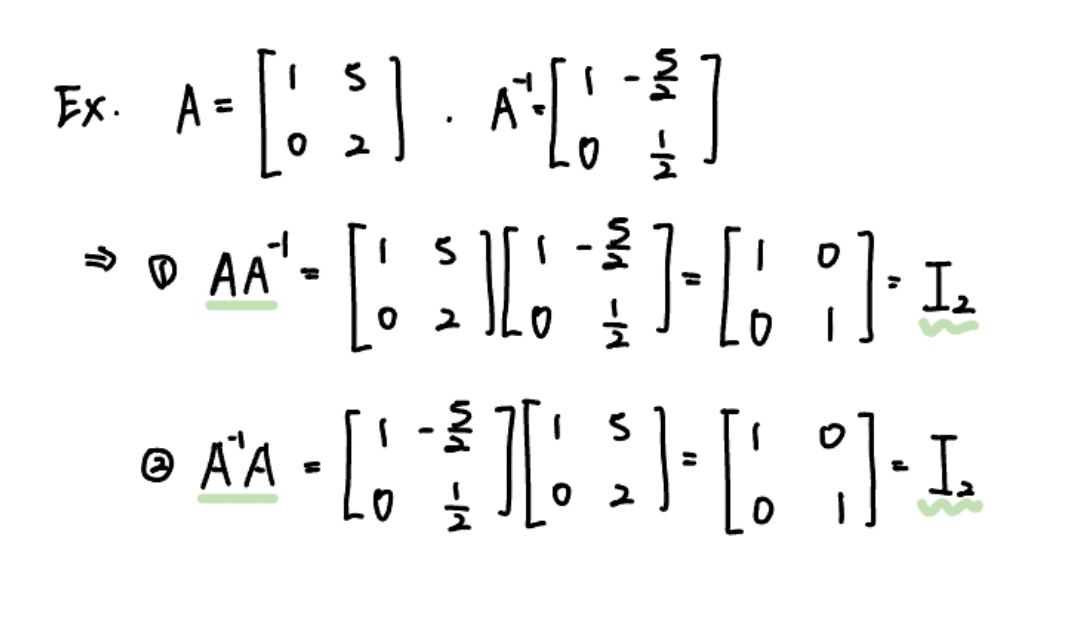
우리는 역행렬을 구하는 방법을 아직 모르지만,
그러면 위 과정을 통해 앞에서 곱하든, 뒤에서 곱하든 항상 Identity Matrix 가 됨을 알 수 있습니다.
2. 역행렬(Inverse Matrix) 구하기
이번에는 직접 역행렬을 구해봅시다.
역행렬을 구하는 방법은 크게 2가지로 나눌 수 있습니다.
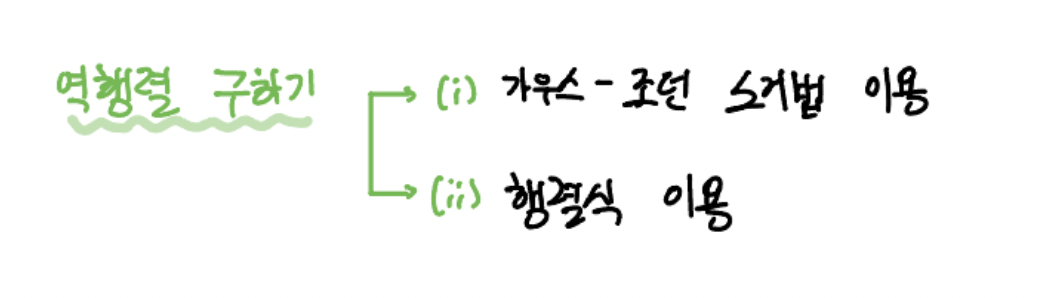
첫 번째는 가우스-조던 소거법(Gauss-Jordan Elimination)을 이용하는 것이고,
두 번째는 행렬식(Determinant)을 이용하는 것입니다.
하나씩 살펴보죠.
(1) 가우스-조던 소거법(Gauss-Jordan Elimination) 이용
예시로 2차원 행렬
그리고 이 행렬은 역행렬이 존재하는 가역행렬입니다.
가역행렬이라는 사실은 행렬
행렬식을 이용한 방법에서 이 개념을 다룰 예정이니 우선 기억만 해둡시다.
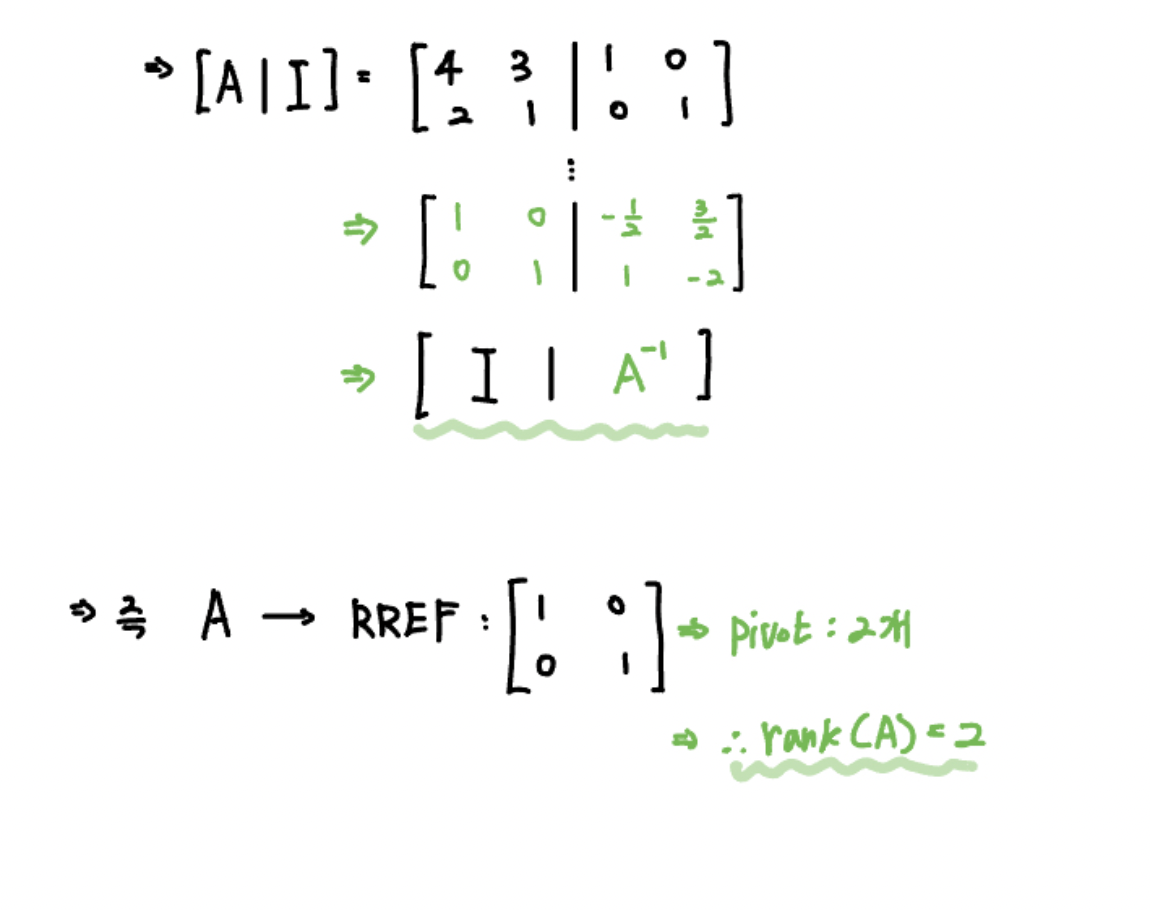
각설하고, 먼저 행렬
확장 행렬은 첨가 행렬(Augmented Matrix)와 같은 말입니다.
그리고 이 확장 행렬에서 행렬
즉 Gauss-Jordan 소거법을 이용해서 RREF (기약 행 사다리꼴 형태) 로 만들어주는 거죠!

그러면 위와 같이 최초
이렇게 가우스-조던 소거법을 이용해서 역행렬을 구해줄 수 있습니다.
근데 좀 번거롭네요.
만약 3차원, 혹은 4차원 등 차원이 커진다면 역행렬을 가우스-조던 소거법으로 계산하는 것은 다소 부담이 될 것 같습니다.
그럴 땐 행렬식을 이용하는 방법이 대안이 될 수 있습니다.
2. 행렬식(Determinant) 이용
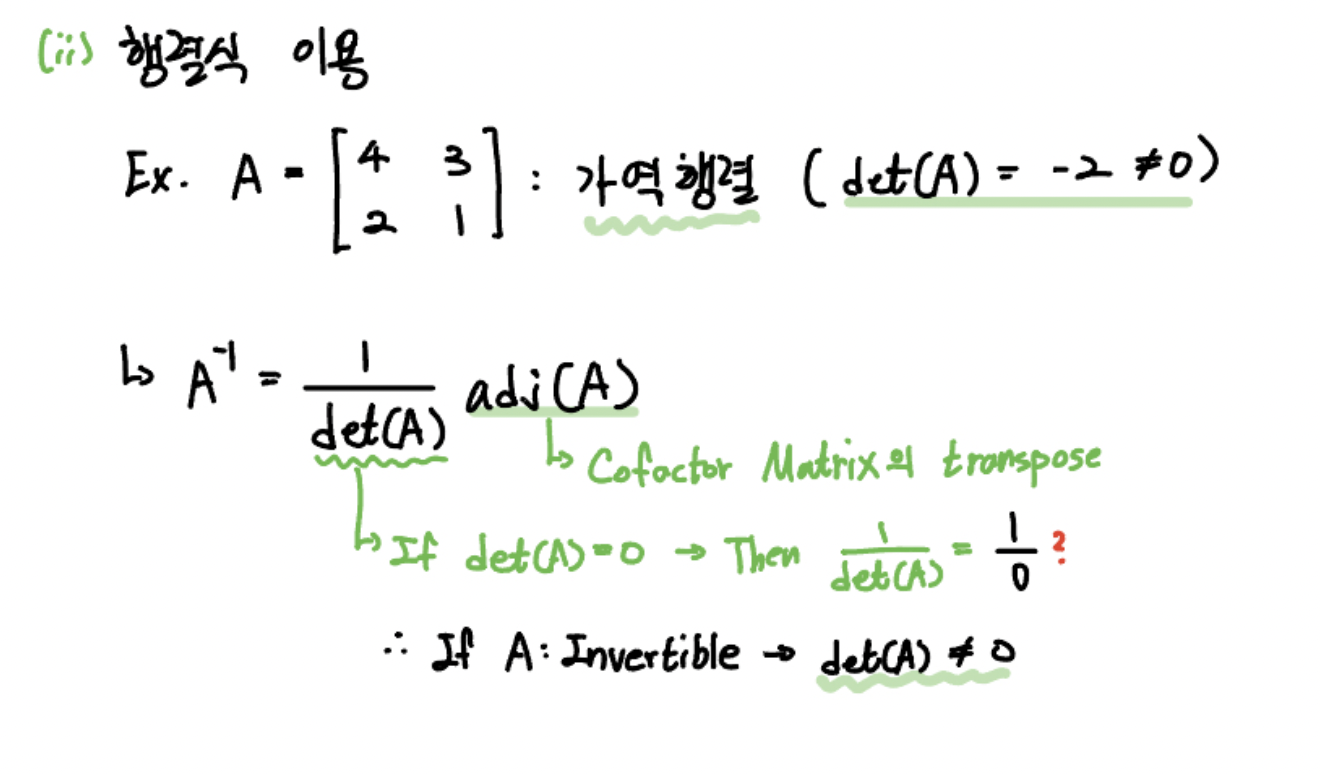
우선 행렬식을 구해보면 -2 가 나옴은 쉽게 이해하실 수 있을 것 같습니다.
여기서
그리고
여기서 왜 가역행렬의 행렬식이 0이 되면 안 되는지 이유를 알 수 있습니다.
만약 행렬식이 0이라면
그러므로 역행렬이 존재하는 가역행렬이 되려면, 이 행렬의 행렬식은 항상 0이 되어서는 안 됩니다.
그러면 한번 행렬식과 adjoint를 이용해 역행렬을 구해봅시다.
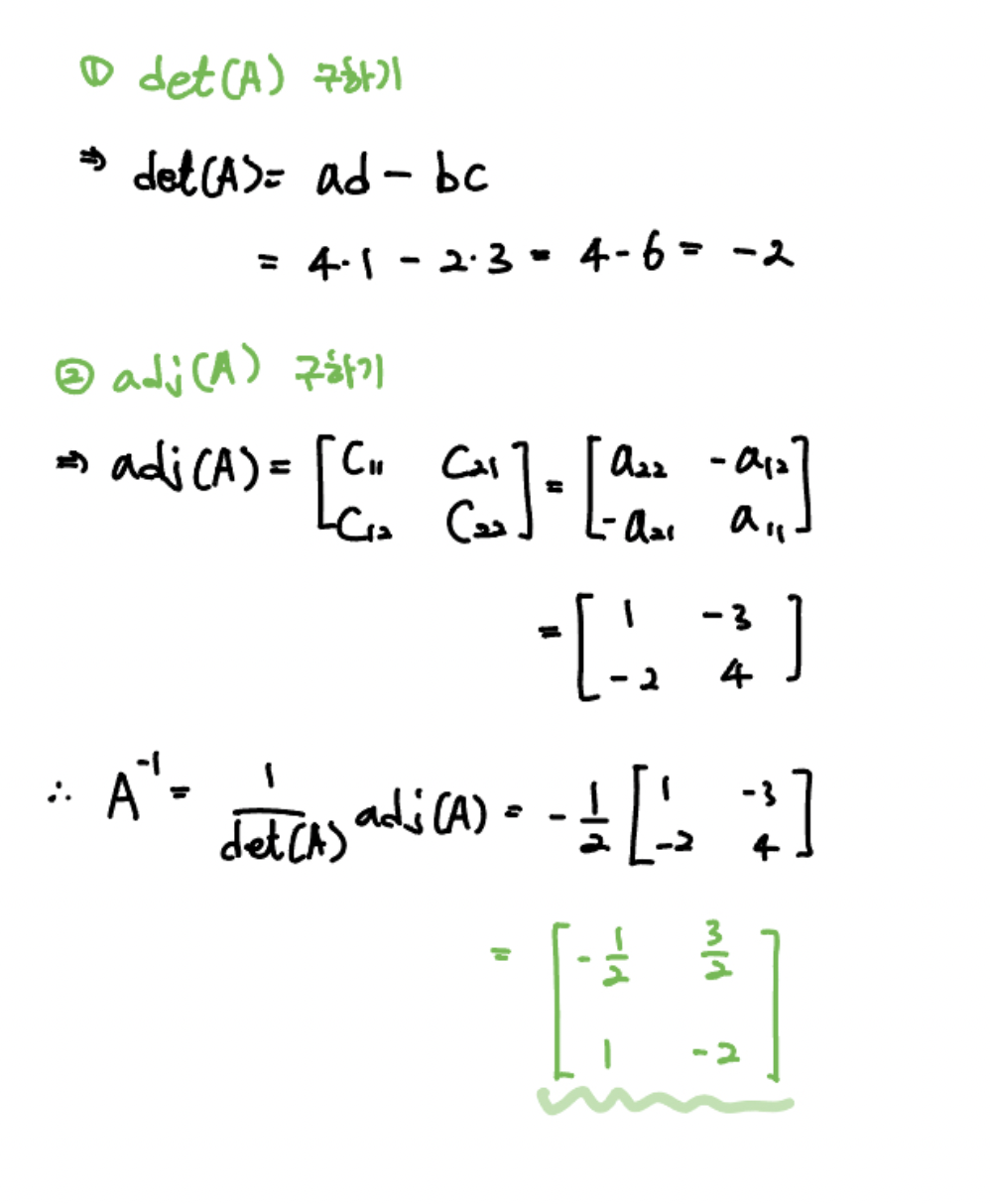
지난 포스팅에서 adjoint 의 개념을 보고 오셨다면 어렵지 않을 거라 생각합니다.
어쨌든 가우스-조던 소거법을 이용하든, 행렬식을 이용하든 역행렬은 동일함을 보일 수 있습니다.
둘 중 편한 방법을 사용하시면 되지만 ... 4차원 이상으로 행렬이 커지게 되면 손으로 역행렬을 구하는 것은 꽤나 어려울 것 같습니다. (저는 계산이 약해서 무조건 실수를 합니다 ... ㅜㅜ)
그나저나 재밌는(?) 사실들이 보이는 것 같습니다.
가우스-조던 소거법을 이용하면 가역행렬은 항상 RREF, 즉 Identity Matrix 가 된다는 건데요.
기억하실진 모르겠지만, 가우스-조던 소거법 포스팅에서 간단하게 랭크(rank)의 개념을 다뤘었습니다.
2020.07.01 - [Statistics/Matrix Algebra] - [행렬대수학] 가우스-조던 소거법(Gauss-Jordan Elimination)
[행렬대수학] 가우스-조던 소거법(Gauss-Jordan Elimination)
Review 참고 포스팅 : 2020/06/28 - [Statistics/Matrix Algebra] - [행렬대수학] 가우스 소거법(Gaussian Elimination) [행렬대수학] 가우스 소거법(Gaussian Elimination) Review 참고 포스팅 : 2020/06/28 - [Statistics/Matrix Algebra]
datalabbit.tistory.com
즉 rank는 pivot의 개수를 의미하죠. 그러므로 위 가역행렬
생각해보면 가역행렬의 행렬식은 항상 0이 아닌 상수잖아요?
그러면 역행렬을 갖는 어떤 n x n 가역행렬은 항상 행렬식이 0이 아닌 상수이고, rank(A) = n 을 만족하며 유일한 역행렬을 갖는 행렬이겠네요?
이렇듯 임의의 행렬이 가역행렬(Invertible Matrix)이라면, 다음과 같은 명제는 모두 동치입니다.
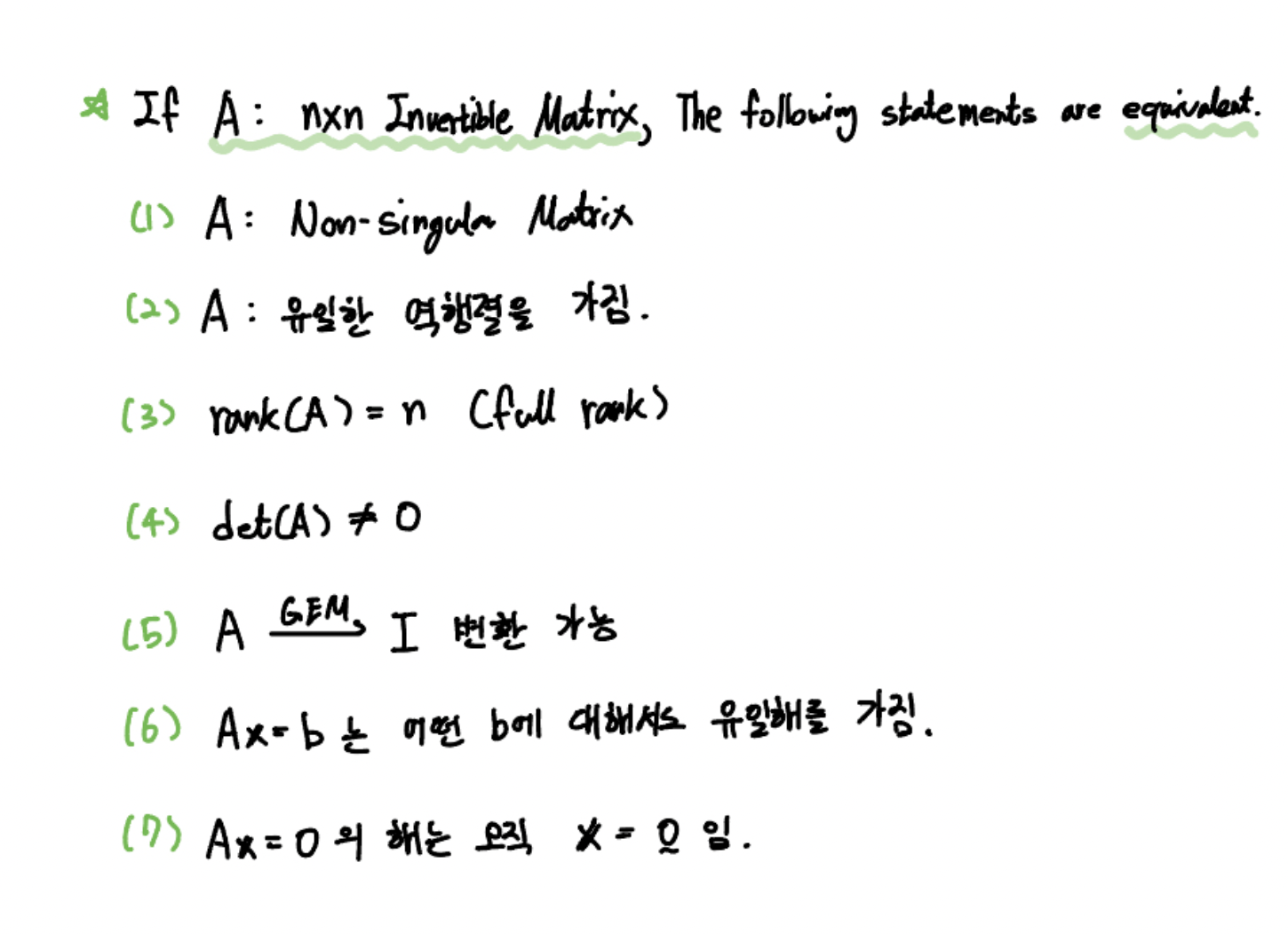
추가로 가역행렬
사실 위 사실들 말고도 중요한 사실들이 많습니다.
rank(A) = n 이라는 것은 행렬 A의 모든 column은 linearly independent 한다는 것을 의미하고,
이는 행렬의 column들이
뿐만 아니라 고윳값(Eigen Value)의 개념과도 연결할 수 있고요.
하지만 아직 이런 개념들을 다루기엔 시기상조이니, 조만간 다루도록 하겠습니다.
다음 포스팅에서는 행렬식을 이용해 행렬의 해(solution)을 구하는 방법인 크래머 룰(Cramer's Rule)에 대해 다뤄보도록 하겠습니다.
감사합니다.
잘 읽으셨다면 게시글 하단에 ♡(좋아요) 눌러주시면 감사하겠습니다 :)
(구독이면 더욱 좋습니다 ^_^)
* 본 블로그는 학부생이 운영하는 블로그입니다.
따라서 포스팅에 학문적 오류가 있을 수 있으며, 이를 감안해서 봐주시면 감사하겠습니다.
- 간토끼(DataLabbit)
- B.A. in Economics, Data Science at University of Seoul